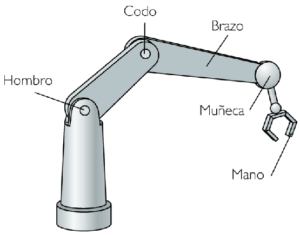
BRAZO ROBOTICO HIADRAULICO
BRAZO ROBOTICO HIADRAULICO
Categoría: Pandilla Kids (3ro., 4to., 5to. y 6to. Año de primaria)
Área de participación: Ciencias de la ingeniería
Resumen
El presente proyecto se basa en el Brazo robótico hidráulico, por medio de una investigación documental y experimental entenderemos el funcionamiento del mecanismo del brazo así como sus aplicaciones, se presenta un brazo robótico hidráulico construido con materiales accesibles y se explica la teoría de pascal, como es posible transmitir una potencia por medio de un liquido y transformarla en fuerza y movimiento para cargar un objeto tal y como funcionan en la industrias.
Pregunta de Investigación
¿Cómo funciona un brazo Robótico hidráulico?Planteamiento del Problema
El brazo hidráulico de pende del principio de Pascal en donde la precion a lo largo de un sistema cerrado es constante.Consiste en dos cilindros de diferente sección comunicados entre sí cuyo interior es impulsado por agua.
Antecedentes
Loa siguientes antecedentes fueron documentados mediante una investigación en la Biblioteca José Vasconcelos CDMX
ORIGEN DEL BRAZO HIDRAULICO
Apareció basándose en el descubrimiento de la prensa hidráulica de Pascal la cual permite levantar grandes masas con pequeñas fuerzas que se aplica en el brazo hidráulico. En la antigüedad por la necesidad de construir grandes edificaciones crearon una herramienta para levantar y transportar grandes masas que utilizaban para la construcción; esta herramienta era un brazo de madera que giraba sobre un eje para poder levantar y llevar el material de un lugar a otro.
El brazo constaba de un sistema de poleas que por la fuerza de los trabajadores que jalaban las cuerdas le permitía levantar al material y luego bajarlo cuando se disminuía la fuerza. Con el transcurso de los años este brazo fue adquiriendo mejorías tanto en materiales como en su funcionamiento. Cuando Pascal descubre la prensa hidráulica estos brazos cambiaron radicalmente ya que se comenzaron a utilizar un sistema parecido a la prensa hidráulica, las cuales permitían levantar grandes pesos con menos esfuerzo.
En nuestra época estos brazos hidráulicos son utilizados para diferentes objetivos como son: para las construcciones, para el transporte de carga, para la simulación del funcionamiento de las partes del cuerpo humano como dedos, antebrazos, brazos, piernas, etc.
Blaise Pascal
(19 de junio 1623-París, 19 de agosto de 1662)
Fue un polímata, matemático, físico, filósofo cristiano y escritor francés. Sus contribuciones a la matemática y a la historia naturalincluyen el diseño y construcción de calculadoras mecánicas, aportes a la teoría de la probabilidad, investigaciones sobre los fluidos y la aclaración de conceptos tales como la presión y el vacío. Después de una experiencia religiosa profunda en 1654, Pascal abandonó la matemática y la física para dedicarse a la filosofía y a la teología.
Principio de Pascal o ley de Pascal
Es una ley enunciada por el físico-matemático francés Blaise Pascal (1623-1662) que se resume en la frase: la presión ejercida sobre un fluido incompresible y en equilibrio dentro de un recipiente de paredes indeformables se transmite con igual intensidad en todas las direcciones y en todos los puntos del fluido.
Hidráulica
La hidráulica es la rama de la física que estudia el comportamiento de los fluidos en función de sus propiedades específicas. Es decir, estudia las propiedades mecánicas de los líquidos dependiendo de las fuerzas a las que son sometidos. Todo esto depende de las fuerzas que se interponen con la masa y a las condiciones a las que esté sometido el fluido, relacionadas con la viscosidad de este
FLUIDOS
Es la parte de la física que estudia la acción de los fluidos en reposo o en movimiento, tanto como sus aplicaciones y mecanismos que se aplican en los fluidos. Es la parte de la mecánica que estudia el comportamiento de los fluidos en equilibrio (Hidrostática) y en movimiento (Hidrodinámica). Esta es una ciencia básica de la Ingeniería la cual tomó sus principios de las Leyes de Newton y estudia la estática, la cinemática y la dinámica de los fluidos.
PISTONES
Se denomina pistón Se trata de un émbolo que se ajusta al interior de las paredes del cilindro mediante aros flexibles llamados segmentos. Efectúa un movimiento alternativo, obligando al fluido que ocupa el cilindro a modificar su presión y volumen o transformando en movimiento el cambio de presión y volumen del fluido. En todas las aplicaciones en que se emplea, el pistón recibe o transmite fuerzas en forma de presión de a un líquido o de a un gas.
TRANSMISIÓN DE POTENCIA:
Una fuerza mecánica, trabajo o potencia es aplicada en el pistón A. La presión interna desarrollada en el fluido por su la densidad ejerciendo una fuerza de empuje en el pistón B. Según la ley de Pascal la presión desarrollada en el fluido es igual en todos los puntos por la que la fuerza desarrollada en el pistón B es igual a la fuerza ejercida en el fluido por el pistón A, asumiendo que los diámetros de A y B son iguales y sin importar el ancho o largo de la distancia entre los pistones, es decir por donde transitará el fluido desde el pistón A hasta llegar al pistón B.
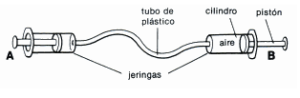
APLICACIÓN DE POTENCIA EN JERINGAS:
El largo cilindro de la figura puede ser dividido en dos cilindros individuales del mismo diámetro y colocados a distancia uno de otro conectados entre si por una tubo. El mismo principio de transmisión de la fuerza puede ser aplicado, y la fuerza desarrollada en el pistón B va ser igual a la fuerza ejercida por el pistón A. En el siguiente gráfico podemos observar la versatilidad de los sistemas hidráulicos y/o neumáticos al poder ubicarse los componentes aislantes no de otro, y transmitir las fuerzas en forma inmediata a través de distancias considerables con escasas perdidas. Las transmisiones pueden llevarse a cualquier posición. Aun doblando esquinas, pueden transmitirse a través de tuberías relativamente pequeñas con pequeñas perdidas de potencia.
Objetivo
Dar a conocer a toda la comunidad escolar las funciones ,el mecanismo y como se construye un brazo Robotico hidráulico con materiales accesibles.
Justificación
Yo quiero construir un brazo hidráulico como los que hay en las industrias de una manera sencilla, utilizando jeringas y agua y cartón para así poder observar de cerca su funcionamiento teórico y práctico como se hacen en las fábricas modernas, en donde se usan brazos robóticos en vez de trabajadores haciendo una demostración práctica, didáctica y divertida al levantar algunos objetos.
Hipótesis
Si se construye un brazo Robótico hidráulico además se informa a la comunidad sobre la utilidad que tiene entones se podrá comprobar el principio de Pascal.
Método (materiales y procedimiento)
METODOLOGÍA y PROCEDIMIENTO
VISITA DE CAMPO
Visita a la escuela superior de ingeniería mecánica y eléctrica del IPN unidad Atzcapotzalco
Mi tio Ruben Caro Briones es Ingeniero en robotia y actualmente hace un doctorado en IPN por lo que nos hizo una visita guiada y una demostración en el área de Hidráulica y neumática de su universidad. Cuatro estudiantes de 5°año de ingeniería nos invitaron a ver como funcionaban los brazos robóticos por medio del aire que pasa a través de unas mangueras que hacen que el brazo se mueva hacia donde lo dirijas, nos explicaron cada parte de los brazos, como funcionan, para que sirven y también me dejaron moverlo hacia donde yo quisiera. Fue una experiencia muy emocionante y aprendimos mucho.
PROCEDIMIENTO
Materiales
Para construir un brazo robótico necesitamos:
8 jeringas de 10 ml.
10 Palillos de brocheta
12 bate lenguas
2 Tablas para maquetas de 1/8
Resistol UHU y Cinta
1 ½ de manguera para acuario
Cinturones de plástico
Alambre y Pinzas
Lápiz, Regla, escuadras. Cúter
Taladro y brocas
Plantilla impresa de las partes de un brazo hidráulico (buscar en internet)
Una base grande de madera, puede ser reciclada
1 Con base a la plantilla impresa se trazan dos veces las partes del brazo sobre la tabla
2 Con un cúter se cortan las piezas marcadas, en total son 8 piezas
3 Con el taladro se les hace una perforación en donde indica la planilla
4 juntamos las piezas que son iguales y con los palitos de brocheta las unimos,
- Insertar el palito de brocheta
- darle la separación de la circunferencia de una jeringa
- pegar
- cortar el sobrante
5 Unimos las dos piezas largas y la base con el mismo procedimiento den pasa anterior, los palillos ahora servirán de ejes para que el brazo se mueva
6 con el taladro se perfora el centro del extremo del embolo, para que pase el palito y la jeringa quede adentro de la estructura
7 Se colocan tres jeringas que funcionaran como pistones para mover las articulaciones del brazo
8 Las jeringas se sujetan con los cinturones de plástico a los palitos fijos que sirvieron de unión, no a los ejes, y procedemos a pegarlas con colaloka
9 Se procede a hacer la muñeca o pinza con la que se sujetaran y cargaran los objetos
- Cortamos los bate lenguas por la mitad
- se saca un centro a 1 cm. De la orilla, para perforarlos con el taladro
- se pegan en forma de escuadra
10 cortamos la base cuadrada que sobraba por la mitad formando un triángulo y se fijan las piezas con palitos y alambre
Ya armado el brazo se fija a la base mediante un eje formado por un palillo, este solo se inserta a la base grande de madera
12 Con los bate lenguas y los palillos se forman dos ejes en los que se fijan las cuatro palancas a la base grande
13 se llenan las jeringas con agua pintada de anilina y unimos las jeringas de la punta A al punto B con la manguera también llena de agua para que no forme un vacío
Galería Método





















Resultados
Habiendo terminado la construcción del brazo robótico hidráulico, procedimos a probarlo cargando diferentes objetos, tanto livianos como pesados, la pinza los toma de los lados y al accionar la palanca con agua azul se abre o se cierra, al igual que al pistón del codo con agua verde, que tiene un movimiento horizontal para acercarse o alejarse, y el hombro de color rojo con un movimiento vertical para subir o bajar el brazo así se ajusta cada uno hasta que se logró tomar el objeto para levantarlo y pasarlo de un lado a otro con el pistón amarillo que sirve como la cintura que hace un movimiento rotatorio.
Galería Resultados
Discusión
Conclusiones
Con la construcción del brazo pudimos hacer muchas pruebas cargando y moviendo objetos, también comprendí una parte de la hidráulica con en la que por medio de la presión que ejerce el agua en dos jeringas unidas por una manguera; un brazo robótico se mueve y puede realizar diversos trabajos trabajos
Bibliografía
Experimentos de física
Salvador Gil
Editorial Alfaomega
P 548
Física experimental 2
Hector Lopez Montiel
Publicaciones culturales
Pag. 218
Física Conceptos y aplicaciones
Paul E. Tippens
Mac Grawll Hill
P 578
BRAZO ROBOTICO HIADRAULICO
BRAZO ROBOTICO HIADRAULICO
Summary
Research Question
How to build a hidraulic robotic´s arm?Problem approach
The hidraulic robotic arm depend of pascal prinsiple were the presurre in the close system is constan .It consist in two cilindres,with diferent size embolo conoted each other impulsed by water.
Background
Objective
To announce the school community the functions ,the mechanism and haw to build a hidraulic robotic´s arm with accesibles materials.
Justification
I want to build an hidraulic robotic arm like the robots in the company but in a easy way,using syringes and liquid, so, we´ll be able to move things whit an hidraulic arm insetead using workers, in this case usig the hands in a funny didactic and practic
Hypothesis
If an hidraulic robotic arm is built and it is informated to the community about the utility that it has, then it will possible check the pascal principle
Method (materials and procedure)
Method Gallery
Results
Results Gallery
Discussion
Conclusions
With the construction of the arm we could do many tests loading and moving objects, I also realized a part of hydraulics with which by means of the pressure exercised by the water in two syringes connected by a hose; a robotic arm moves and can perform different jobs jobs
Bibliography
